Building my first FPV drone from scratch - part 3
From part 2 of this series, you may recall the plan so far:
- Buy the parts
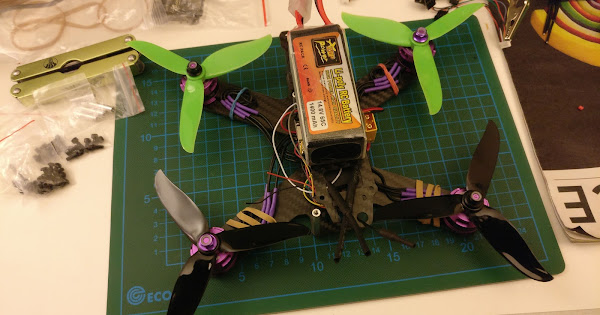
- Assemble the parts
- Learn to fly FPV
- Fail, fix, improve <– I AM HERE
- Strap lasers to the whole setup!
Between building & flying
There aren’t too many steps to bridge the gap between physically assembling the quadcopter and getting it in the air. Essentially, you connect the battery WITHOUT the propellers to verify your RC signals spin the motors on command, and then you do it again in WITH the propellers screwed on somewhere safe when you’re ready.
Simple right?
Well yes, but annoyingly slow to achieve in reality thanks to a few silly hiccups (and a pandemic etc.) en route:
- my maiden voyage attempts kept flipping the quadcopter over immediately on takeoff. Turns out I needed to calibrate the motors to ensure that they all power-on at precisely the same time when increasing the throttle, otherwise a couple of them spin faster than the others and hence it flips over. Calibrating is a pretty simple process, but easily overlooked:
- my batteries kept dying and then refusing to charge so I replaced the battery twice; each with quite long delivery delays on top of my general lethargy (months!) to actually place the order each time…
- … before realising the problem was a dud battery charger and replacing that instead alongside a yet another new battery.
Eventually, a visit from my niblings kicked me into action to organise a proper flight effort after removing all the technical obstacles. It’s a been a good few years of on again off again tinkering but I’ll be damned if I wasn’t going to claim my “cool fpv dronebuilding uncle 🏆” accolades before anyone else in their lives.
Flying, failing, fixing <– CURRENT STATUS
It turns out that flying quadcopters in a controlled manneris quite tricky!
Specifically, getting accustomed to the left thumb’s role in both adjusting throttle (i.e. height) AND yaw (rotation around the vertical axis) - the latter is usually exclusively handled by the right hand/thumb as the default settings for practically all the FPS gaming I grew up with. In gaming, you usually move with the left hand controls (e.g. WASD on the keyboard, or left thumb), and look around/steer with the right hand (via the mouse or right hand thumbs).
Also, flying is high stakes! The thrill of seeing my hard work airborne was quickly dwarfed by the fear of damaging the drone itself and/or any combo of passers by, trees, private/public property. After a tentative flight in our modest backyard, I had picked a big local park for a longer session…or at least I thought it was big before my machine was zipping around it at crazy speeds and chopping up tree branches.
Long story short: I’m 2 propellers down, and a staunch advocate for practising flight control with a simulator! You can just plug your controller into your computer via usb and use it alongside a number of softwares. I went with Liftoff for now because it had a problem getting the yaw control recognised properly when trying to use FPV Skydive.
Next steps?
I need to put in some serious hours of practise in the simulator before heading out into the real world again with such a powerful quadcopter model. However, I’m keen to try other cheaper and less extreme models with more safety mechanisms built-in so I can compare the flying experience and use it as a baseline to optimise the tuning of my DIY controls towards.
After that, I’ll revisit whether some version of laser tag on multiple drones alongside other innocent “battle” games can work. It’s been years since my original inspiration and it’s exciting to see that the general theme of drone games hasn’t escaped the minds of others in the global community.
Other developments such as toroidal propellers will also be fun to play with alongside different frame designs and configurations.
Overall I’ve already learned a ton from this rewarding little side project and I’m glad to have kept tinkering with it on and off over the years.